
この記事では、三菱電機PLC Qシリーズのロードセル入力ユニット Q61LDを使った較正方法と荷重データ取込方法について解説します。
ゲインの調整やゼロトラッキングの細かな使い方やロードセル本体の細かい仕組みについては今回は触れていきませんので、必要に応じて三菱電機Q61LD「ロードセル入力ユニットユーザーズマニュアル」を御参照下さい。
注意
記事内のラダー図は当ブログで使用するために書いているものですので、実際の機器には運用しておりません。また一切の関係もありません。
目次
A/D変換を使って荷重データを取り込む場合
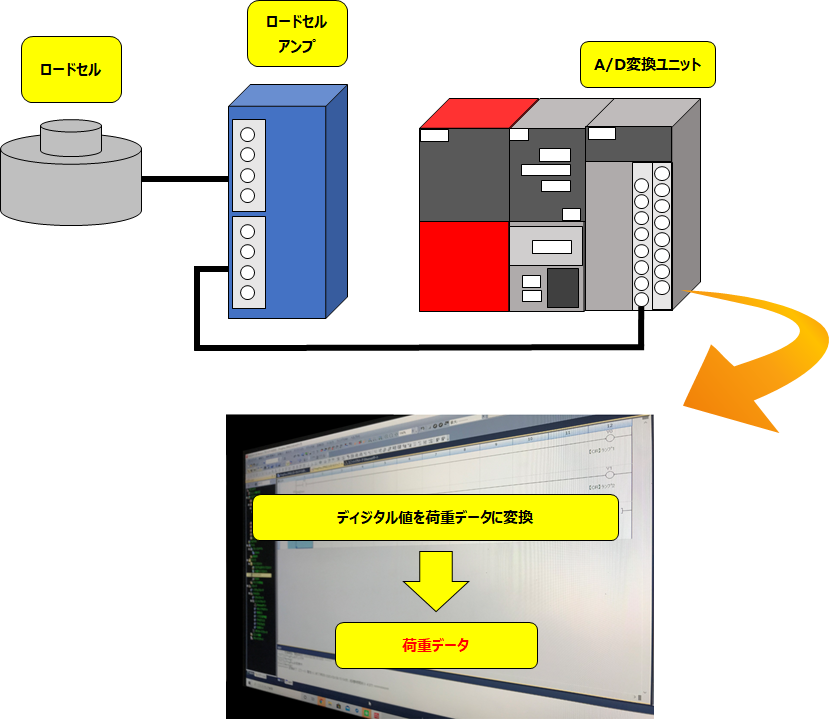
ロードセルからの荷重データなどをA/D変換してPLCへ取り込む際、「ロードセル」⇒「ロードセルアンプ」⇒「AD変換」⇒入力してディジタル値へ変換された後、そこから「荷重データに変換する」と言った流れになります。
ロードセル入力ユニットを使って荷重データを取り込む場合
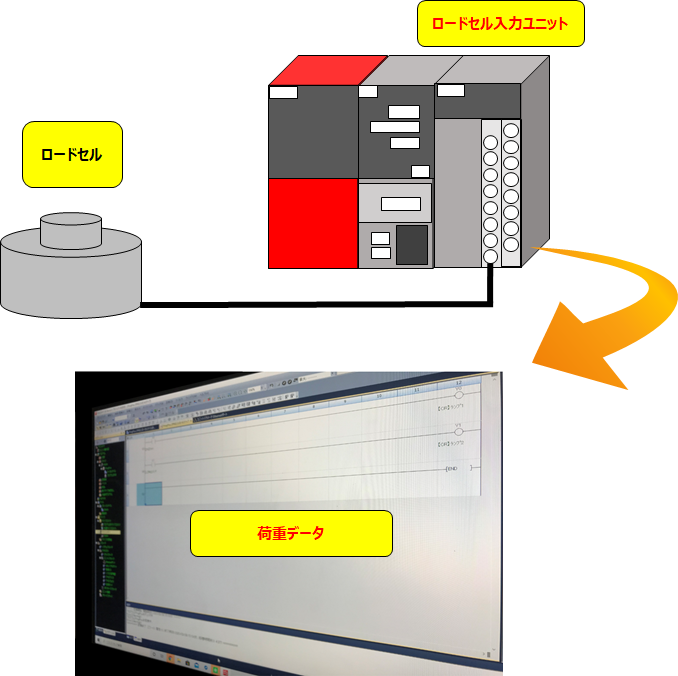
このロードセル入力ユニットを使用する事で、「ロードセル」⇒「ロードセル入力ユニット」⇒「荷重データ」へ変換してくれます。
厳密には異なりますが、イメージとしては「ロードセルアンプ」・「AD変換」・「ディジタル入力値を荷重データへ変換」がこの1台に集約されています。
今回使用する機器

今回の機器構成はこんな感じでやっていきます。
構成
・電源ユニット・・・Q61P
・CPUユニット・・・Q06UDEHCPU
・ロードセル入力ユニット・・・Q61LD
・ベースユニット・・・Q33B
・ロードセル・・・外国製4線式
ロードセル本体のスペックはこの通りです。
ロードセルのスペック
・定格重量・・・25kgf
・定格出力・・・3.0mV/V
・入力端子間抵抗・・・350Ω
今回は較正用に1kgの分銅も合わせて用意します。
接続図
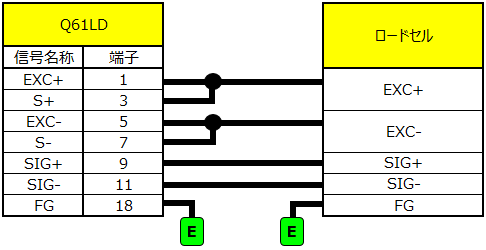
ロードセルを4線式の接続で配線します。
4線式の場合はセンス信号をそれぞれ上記のように「EXC+とS+」、「EXC-とS-」を短絡させる必要があります。
EXCはそれぞれロードセルへ電圧を印加するための端子、SIGはそれぞれアナログ入力の為の端子になります。
パラメータ設定
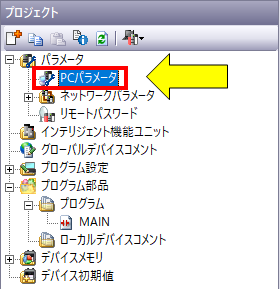
①今回はGX Works2を使用して設定していきます。まずはPCパラメータからCPUとロードセル入力ユニットを登録します。
プロジェクトから「パラメータ」⇒「PCパラメータ」を開きます。
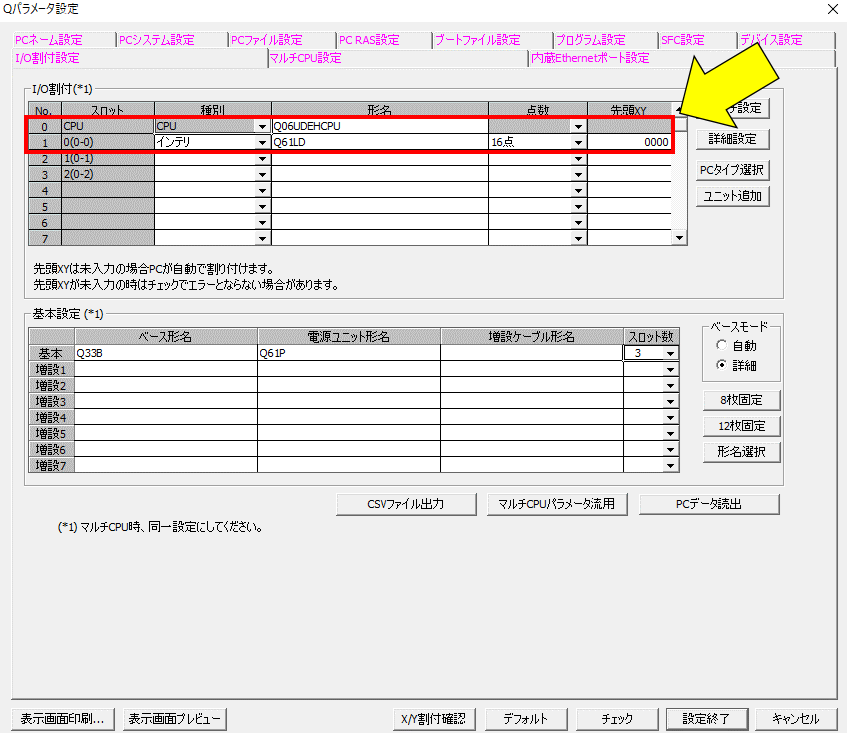
「I/O割付設定」タブをクリックして、ユニットの割付設定をしていきます。
ロードセル入力ユニットQ61LDはインテリジェント機能ユニットですので、スロット0の所の種別に「インテリ」、占有点数は「16点」、先頭XYを今回は「0000」とします。
形名は記載しなくてもOKですが、分かりやすくするために記載いたします。
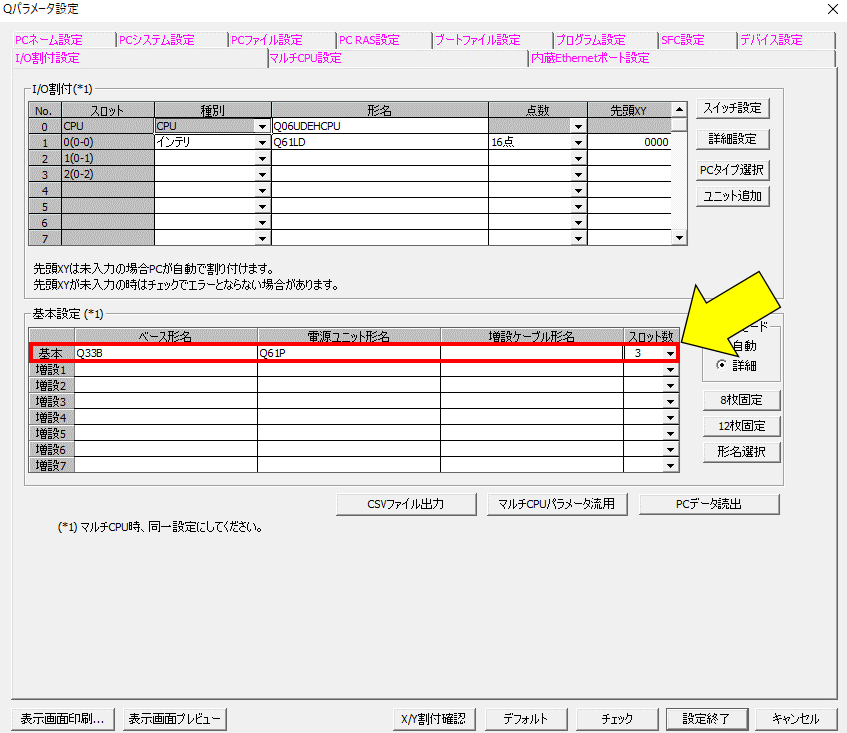
基本設定の欄は、ベース形名「Q33B」、電源ユニット形名「Q61P」、スロット数「3」とします。
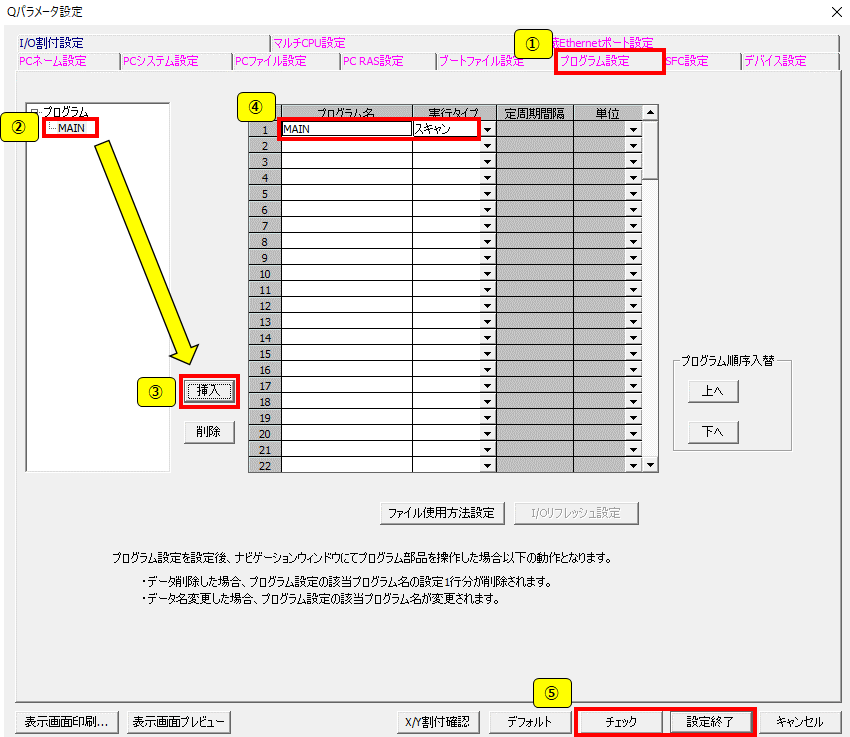
今回はラダーも作成していきたいので、「①プログラム設定」タブをクリックして、プログラム設定をしていきます。
次に「②MAIN」を選択し、「③挿入」をクリックします。
すると④の部分にプログラム名「MAIN」、実行タイプ「スキャン」が入力されます。
完了しましたら⑤より「チェック」⇒「設定終了」の順でクリックし、パラメータ設定画面を閉じます。

ナビゲーション画面より「パラメータ」⇒「①インテリジェント機能ユニット」の項目で右クリックし「②新規ユニット追加」を選択します。
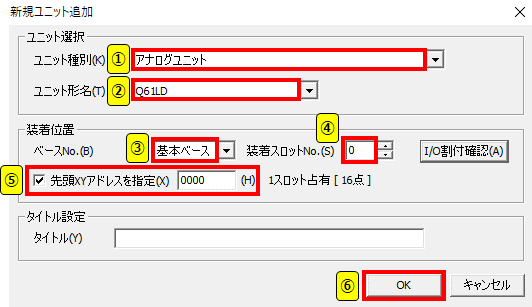
新規ユニット追加画面が開きましたら、ユニット種別を「①アナログユニット」、ユニット形式「②Q61LD」、ベースNo.「③基本ベース」、装着スロットNo.「④0」、⑤先頭XYアドレスを指定します。
入力が終われば「⑥OK」をクリックします。
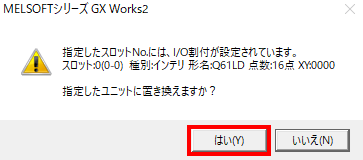
設定に関する画面が出てきますので、問題無ければ「はい」を選択します。
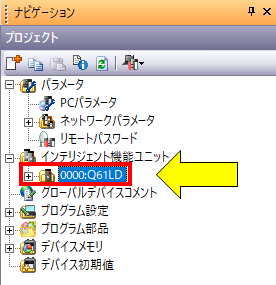
ナビゲーション画面の「パラメータ」⇒「インテリジェント機能ユニット」の所にQ61LDが登録されます。
Q61LDのパラメータ設定
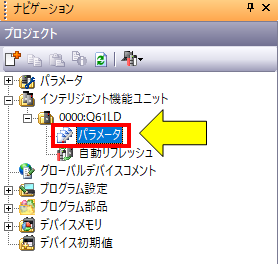
Q61LD側のパラメータを設定をします。
先ほど登録した「Q61LD」の項目から、「パラメータ」を選択します。
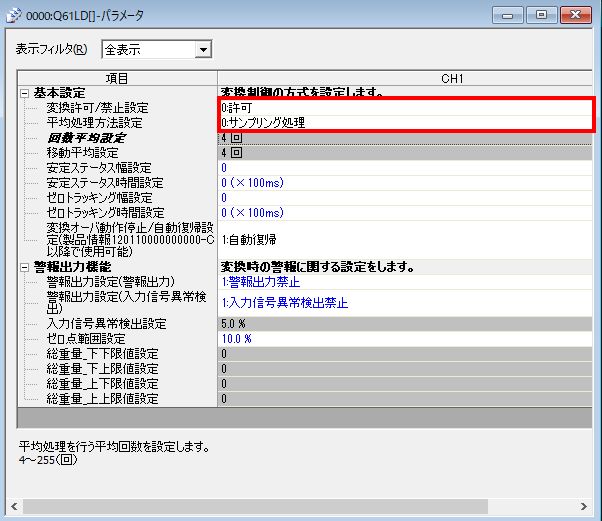
パラメータ画面が開きましたら、基本設定を入力していきます。
今回はそれぞれこのように設定します。
・変換許可/禁止設定・・・「0:許可」
・平均処理方法・・・「0:サンプリング処理」
設定した内容について簡単に説明します。
★変換許可/禁止設定⇒荷重データやアナログ出力をするかしないか
★サンプリング処理⇒このユニットのサンプリング時間は10msなので、10msごとにデータ取りする
ここまで設定した段階で、PLCへパラメータを書き込みます。
書込み後、CPUユニット本体で「RESET」⇒「RUN」を行います。

較正設定とその方法

較正作業では、最初にロードセルユニットへロードセルが「何も負荷の無い状態(静荷重でゼロである状態)」と「基準となる重量をかけたときの状態」というのを教えてあげる必要があります。
これらの作業はそれぞれパラメータ上では
・「負荷の無い状態(静荷重でゼロである状態)」を教える⇒静荷重ZERO較正
・「基準となる重量」を教える⇒静荷重SPAN較正
をしていく形になります。
もう少し嚙み砕いて、今回の例に合わせて記載させて頂きますと、
・静荷重ZERO較正⇒ゼロである状態を教える
・静荷重SPAN較正⇒1kgの分銅を載せて、それが1kgfである事を教える
と言う作業をします。
それでは実際にGX Works2にて作業をしていきます。
較正方法
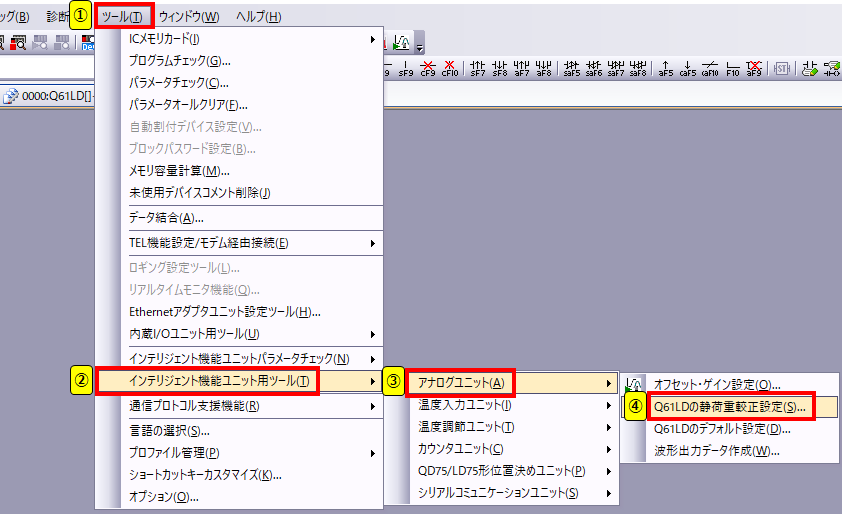
PLCに接続した状態で、「①ツール」⇒「②インテリジェント機能ユニット用ツール」⇒「③アナログユニット」⇒「④Q61LDの静荷重較正設定」を選択します。
ユニット選択画面が表示されます。今回はQ61LDを1台しか装着していませんので、そのまま「OK」をクリックします。
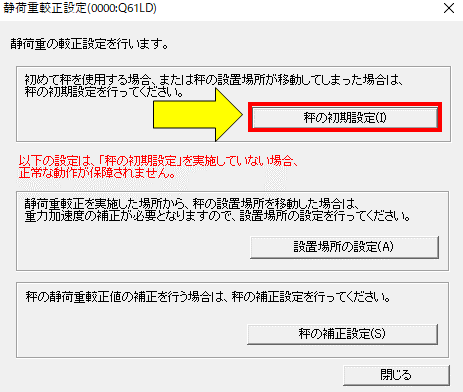
「静荷重較正設定画面」が表示されますので、「秤の初期設定」をクリックします。

「秤の初期設定」画面が表示されます。※画像をクリックすると拡大されます。
再度、ロードセルのスペックを記載させていただきます。
ロードセルのスペック
・定格重量・・・25kgf
・定格出力・・・3.0mV/V
・入力端子間抵抗・・・350Ω
今回較正に使う分銅は1kgのものを使用します。また表示については「g」単位で、最小単位を「1g」とします。
最初にこれらを入力していきます。
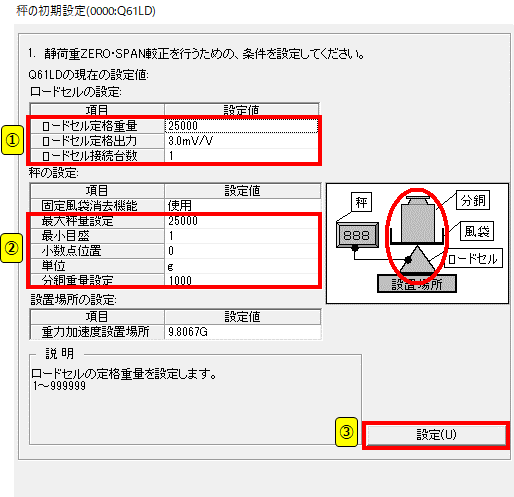
先ほどのスペックを入力します。
①の部分にロードセルのスペックを入力します。
②の部分では、「実際に取り込んだ値をどう表示させるか」を設定していきます。
今回はこんな感じになります。入力しましたら、③の「設定」をクリックします。

ユニットに条件を書き込むかを聞いてきますので、「はい」をクリックします。
静荷重ZERO較正
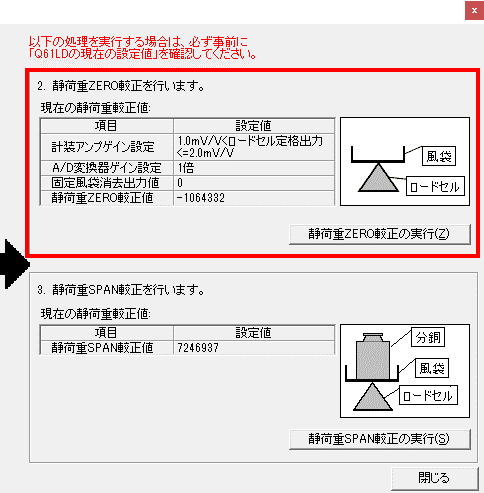
ZERO較正をやっていきます。
ロードセルに何も載せていない状態で、赤枠内右下にあります「静荷重ZERO較正の実行」をクリックします。
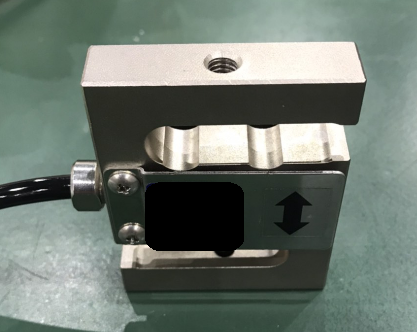
このようにロードセルには何も載せていない状態とします。

ZERO較正を実行するかを聞かれますので、「はい」をクリックします。

ZERO較正が開始されると、このようなバーが表示されます。
ZERO較正が無事終了しましたら、このような画面が表示されまので、「OK」をクリックします。
もし何らかの要因で完了しない場合は、エラーメッセージが表示されます。
その時は
・初期設定が間違っていないか?
・配線(接続)は間違っていないか?
・荷重(負荷)がかかっていないか?
を確認する必要があります。
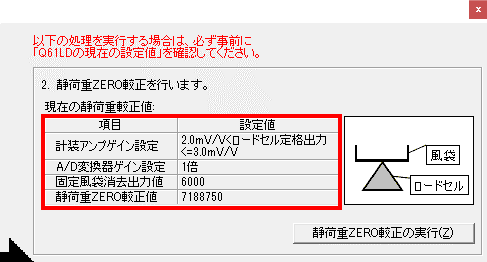
ZERO較正が完了しましたら、結果が赤枠内のような感じで反映されます。
この結果についてはロードセルによって個別に異なるので正解値を判断するのが難しいですが、当方が所有しているロードセルではこんな感じで値が出ました。
次に静荷重SPAN較正をやっていきます。
静荷重SPAN較正
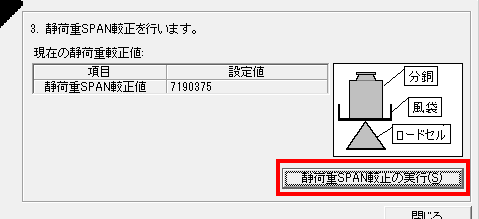
次に静荷重SPAN較正をやっていきます。
ロードセルに分銅などの「基準となる負荷」をかけた状態で、上記画面右下部分にあります「静荷重SPAN較正の実行」をクリックします。

今回はこんな感じで1kgの分銅をロードセルに載せて較正を実行します。
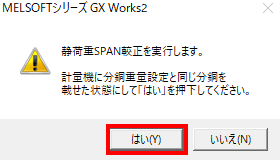
静荷重SPAN較正を実行するかを聞かれますので、「はい」をクリックします。
較正が開始されると、ZERO較正と同じように実行中のバーが表示されます。
静荷重SPAN較正が無事終了しましたら、このような画面が表示されまので、「OK」をクリックします。
ここでも何らかの要因で完了しない場合は、エラーメッセージが表示されます。
その時は
・初期設定(分銅重量設定など)が間違っていないか?
・配線(接続)は間違っていないか?
を確認する必要があります。
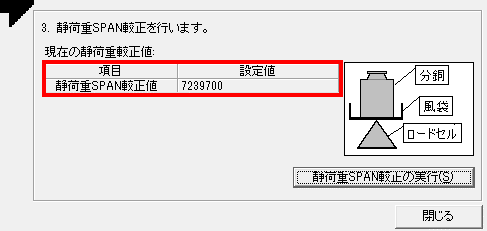
静荷重SPAN較正が完了しましたら、結果が赤枠内のような感じで反映されます。
当方が所有しているロードセルではこんな感じで値が出ました。
ラダーで確認する
今回は確認用に実際にバッファアドレスよりデータをMOVさせて、モニタ値を確認していきたいと思います。
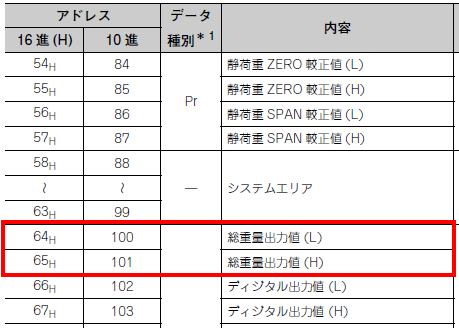
モニタするバッファアドレスは「100,101」です。今回の場合ユニット先頭アドレスが「00」なので「U0¥G100」からDMOV命令で総重量値を取り出していきます。

ラダーはこんな感じで「U0¥G100」からDMOV命令で「D0」へ転送する簡単なものを書いてみました。
モニタだけでしたら「デバイス一括モニタ」から「バッファアドレス」を指定しても見ることが出来ますが、今回は実際に動作を見やすくするためにラダーへ起こします。

実際に「何も載せていない状態」⇒「1kg分銅の載せる」⇒「分銅を取る」動作をしたときの荷重の変化をモニタしました。
モニタ値で「0⇒1000」を表示していることが分かります。
まとめ
今回の記事を要約するとこんな感じです。
ポイント要約
①ロードセルユニットのイメージは「ロードセルアンプ」・「AD変換」・「ディジタル入力値を荷重データへ変換」がこの1台に集約されている
②静荷重ZERO較正は「静荷重でゼロである状態を教える」較正
③静荷重SPAN較正は、例えば「1kg分銅などを載せ、それが1kgfである事を教える」較正