この記事では、三菱電機PLC Qシリーズのロードセル入力ユニット Q61LDの安定ステータス・ゼロトラッキングなどの制御方法について解説します
さらに深い部分を知りたい場合など、必要に応じて三菱電機Q61LD「ロードセル入力ユニットユーザーズマニュアル」を御参照下さい。
注意
記事内のラダー図は当ブログで使用するために書いているものですので、実際の機器には運用しておりません。また一切の関係もありません。
目次
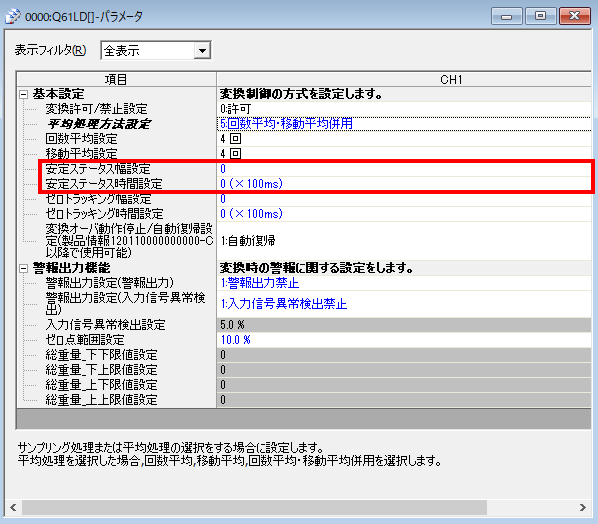
基本設定について

ロードセルユニットを実際に運用するにあたって、その基本設定を機構に合わせて変更していく必要があります。
基本設定には大きく4つの項目が存在します。
- 平均処理方式
- 安定ステータス設定
- ゼロトラッキング設定
- 異常時の動作設定’(警報出力設定も含む)
今回はどういったものなのか、順番に解説していきたいと思います。
平均処理方式
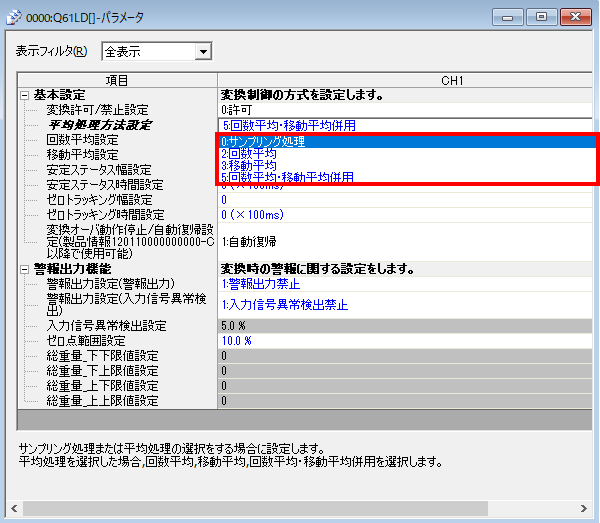
この項目では、荷重データのサンプリングに関する設定をおこなっていきます。
処理方式には
・サンプリング処理
・回数平均
・移動平均
・回数平均、移動平均併用
があります。
回数平均、移動平均の設定回数はこちらで設定します。
サンプリング処理
ロードセルユニットの仕様でサンプリング時間は10msですので、10msごとに重量測定値が更新されます。
回数平均
サンプリング処理を設定回数実施し、最大値と最小値を除外した合計値の平均を出します。
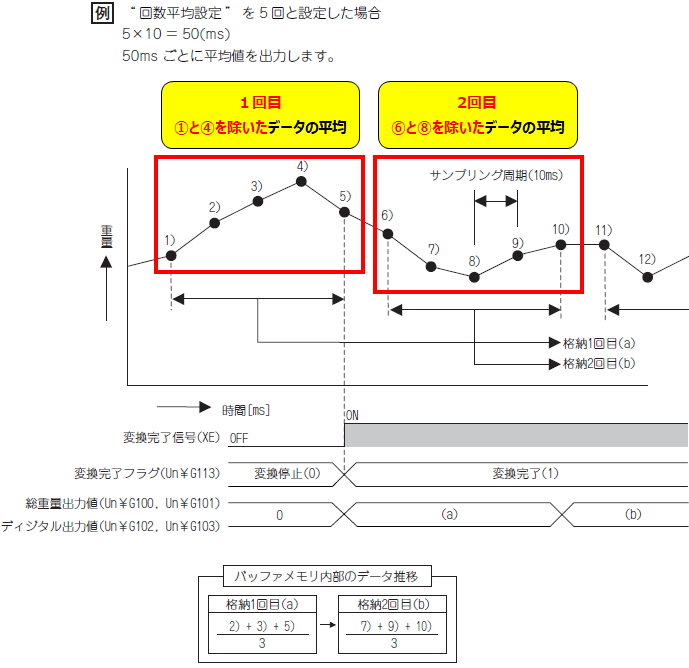
上記の図は回数設定を「5回」に設定した場合の例です。
5回のうち最大値と最小値を除外するので、「(最大値と最小値以外のデータの合計)÷3」となります。
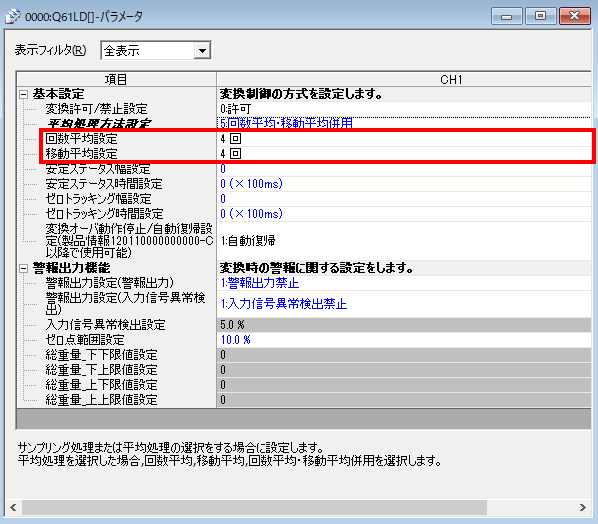
移動平均
サンプリング処理を設定回数実施し、移動平均した合計値の平均を出します。
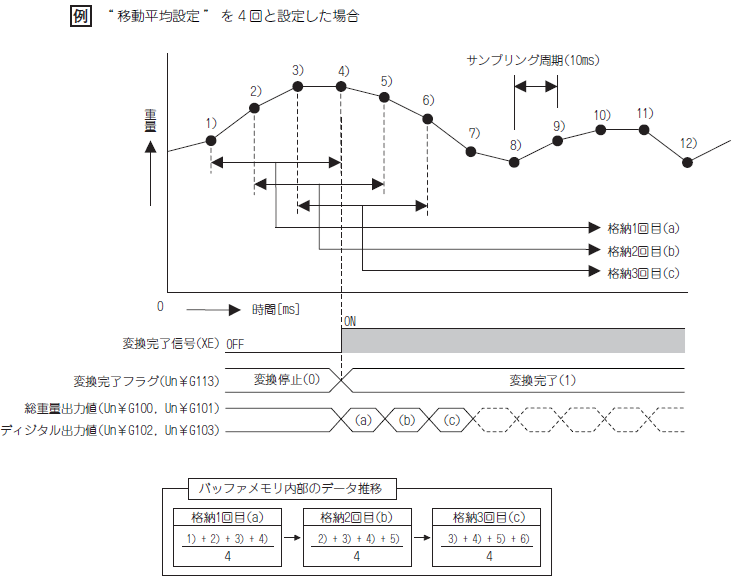
上記の図は移動平均設定を「4回」に設定した場合の例です。
サンプリングごとに移動しながら、その平均値をとります。計算式は上記の図を参照下さい。
回数平均・移動平均併用
サンプリング処理を実施し、回数平均で最大値と最小値を除外した合計値の平均を算出し、それを移動平均した合計値の平均を算出する方式です。
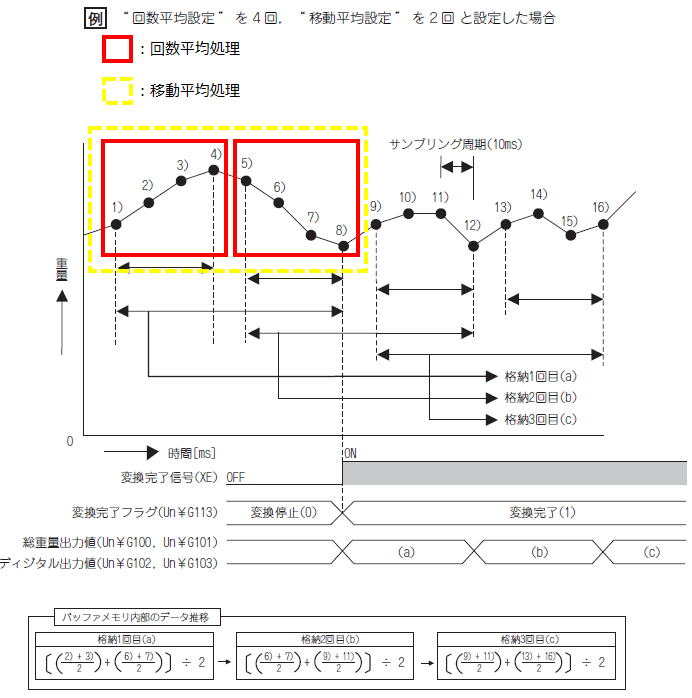
上記の図は回数設定を「4回」、移動平均設定を「2回」に設定した場合の例です。
その名の通り、回数平均をさらに移動平均した形になります。計算式は上記の図を参照下さい。

安定ステータス幅・安定ステータス時間設定
安定ステータス幅と安定ステータス時間設定は、総重量値が安定していると判定するための重量幅とその時間の設定です。
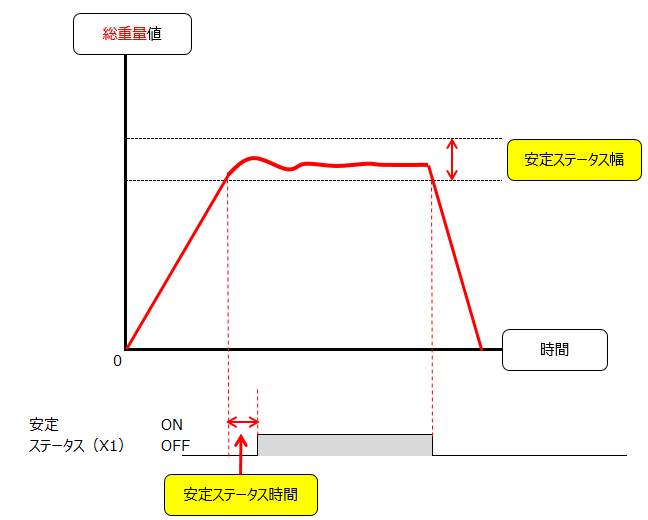
関係性をグラフにするとこんな感じになります。
安定ステータス(X1)を入力させるための設定で、上記の設定にて安定を確認すると「X1」がONします。
ゼロトラッキング幅・ゼロトラッキング時間設定

ロードセルなどにゴミなどの付着物が載ったり、温度変化の影響なのでゼロ点が変化し計量物を空にしても総重量出力値が0 にならない場合に自動でゼロ点調整を行う機能の設定です。
具体的にどのような設定をしていくのかを見てきます。

「ゼロトラッキング幅」は0点が変化した時に、自動的に0点にするための参照にする幅の事で、その幅で設定時間分変化した場合に0点に戻すための確認時間を「ゼロトラッキング時間」と呼んでいます
その幅を超えると自動的に0点にはしてくれません。また、補正前の数値が「ゼロ点範囲」を超えても同様に0点補正はされません。
簡略化したグラフを下記に記載します。
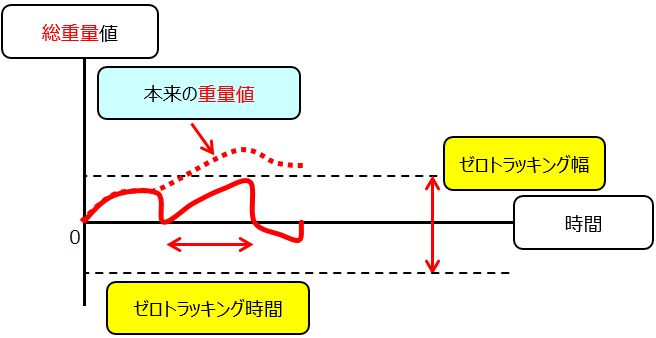
ゼロトラッキング幅とゼロトラッキング時間のイメージはこんな感じです。
注意するポイントとしては、ゼロトラッキングでゼロ点補正されても裏方で本来の重量値が積算されているところです。
例えば0kg~25kgで使用する場合、ゼロ点補正で0.1kg分補正されると、補正後に表示される(有効となる)最大重量は24.9kgとなります。
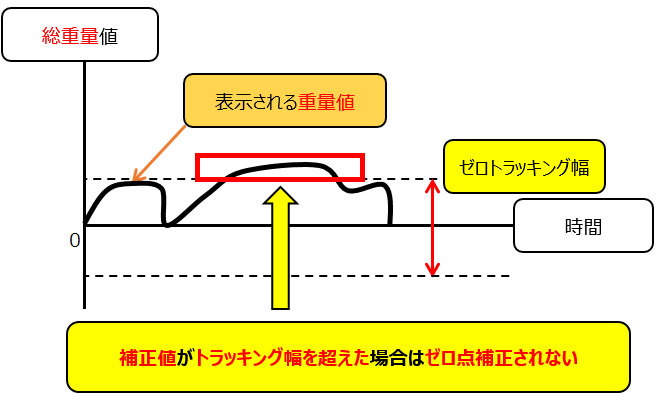
補正値がゼロトラッキング幅を超えた場合はゼロ点補正が行われません。
私の経験上、ゼロトラッキングによるゼロ点補正がされない場合の要因で最も多いのがこれです。

本来の重量値がゼロ点範囲設定を超えた場合はゼロ点補正が行われません。
ゼロトラッキング幅に入っているにもかかわらず、ゼロ点補正がされない場合はこれが原因である可能性が高くなります。
変換オーバ停止/自動復帰設定
本来の重量値(秤量値)が最大秤量設定をオーバーした際などに、以下のエラーが発報されます。
・入力信号異常検出フラグ(Un¥G114.b1)がONする
・入力信号異常検出信号(XC)がONする
・ALM LEDが点灯(または点滅)する
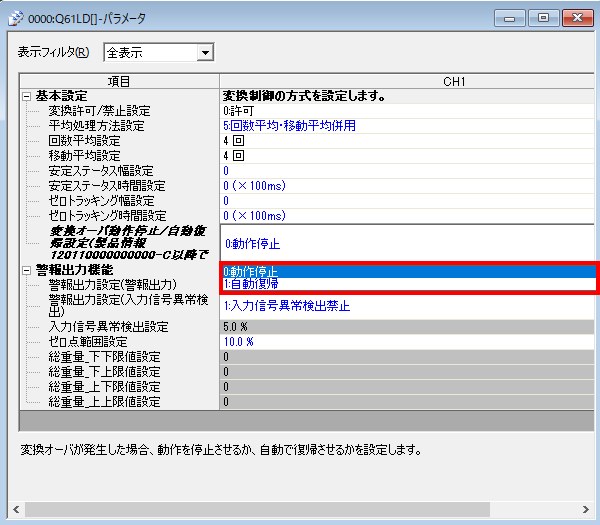
オーバーした後に重量値が正常値に戻った場合に、自動復帰させるかエラーリセットで復帰させるかを選択します。
「0:動作停止」を選んだ場合、総重量出力値(Un¥G100,Un¥G101)を正常値に戻して,エラークリア要求(YF) を「OFF→ON→OFF」することで、入力信号異常検出フラグ(Un¥G114.b1)と入力信号異常検出信号(XC)がOFFし、ALMLEDが消灯します。
「1:自動復帰」を選んだ場合、総重量出力値(Un¥G100,Un¥G101)を正常値に戻ったら自動的に入力信号異常検出フラグ(Un¥G114.b1)と入力信号異常検出信号(XC)がOFFし、ALMLEDが消灯します。
この辺りは装置仕様やご自身の構想で使い分けられるといいかと思います。
警報出力設定
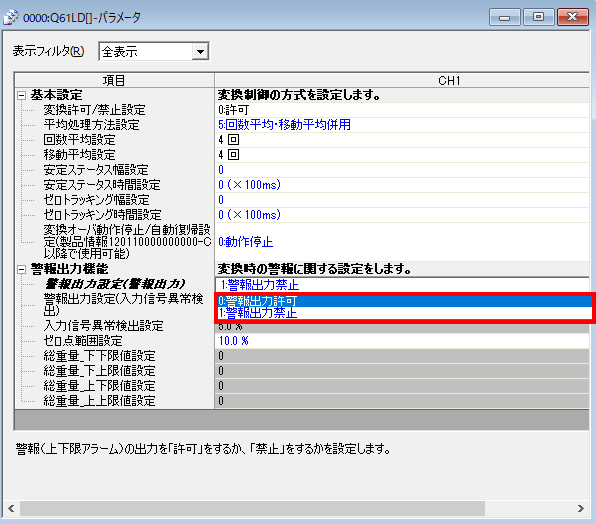
総重量出力値があらかじめ設定された範囲に入った場合に警報を出力する機能です。
ここでは警告の出力を「許可」にするか「禁止」にするかを設定します。

「0:警報出力許可」に設定すると、警報に関するしきい値が設定できるようになります。
それぞれの設定に関する関係性はこのようになっています。
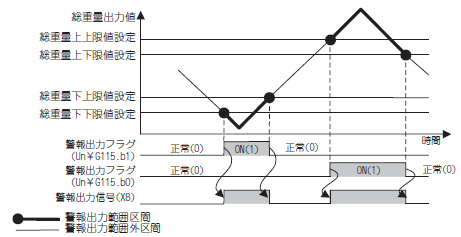
秤量値オーバーが発生する前や、あらかじめ設定した範囲に来た時に信号を取り込んだりして運用したりも出来ます。
入力信号異常検出設定

アナログ信号の異常を検出した際に任意の検出設定(%)を超えた際に,入力信号異常検出フラグ(Un¥G114.b2)でフラグを立てるか立てないかを設定します。

「0:入力信号異常検出許可」に設定すると、検出設定が有効になります。
この入力信号異常検出設定ですが、総重量出力値(Un¥G100, Un¥G101) > 最大秤量設定(Un¥G56,Un¥G57) + 最大秤量設定 (Un¥G56,Un¥G57)× 入力信号異常検出設定 [%]の関係式に使用します。
仮にデフォルトの「5%」の場合、最大秤量値を「25kg」に設定したとすると「26.25kg」を上回るとフラグが立ちます。
フラグの解除については総重量出力値(Un¥G100,Un¥G101)を正常値に戻し、エラークリア要求(YF) を「OFF→ON→OFF」することで入力信号異常検出フラグ(Un¥G114.b1)をリセットすることが出来ます。
ゼロ点範囲設定
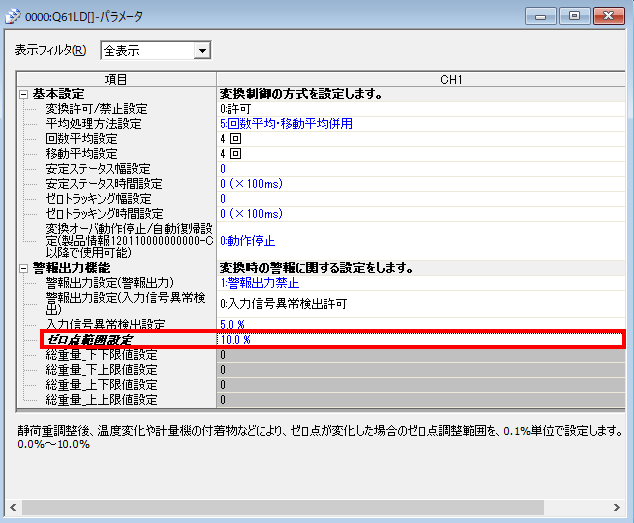
ゼロセットを行う場合の調整範囲をここで設定します。
先ほどゼロトラッキングについての解説をしましたが、ゼロセットも同じようにゼロ点に補正する機能です。
ざっくりですが、違いとして
・ゼロトラッキング・・・自動でゼロ点補正
・ゼロセット・・・マニュアルにて任意のタイミングでゼロ点補正
のイメージです。
ゼロセットはゼロ点補正をラダーからフラグを立てておこないます。そのための有効範囲の設定になります。
範囲を求める計算式は、最大秤量設定(Un¥G56,Un¥G57)×ゼロ点範囲設定[%]です。
ここでの設定はゼロトラッキング動作にも関わってきますので、ゼロトラッキング動作を使用する場合は注意してこちらの設定も確認する必要があります。
まとめ
今回の記事を要約するとこんな感じです。
ポイント要約
①平均処理設定はレスポンス重視だと「サンプリング処理」、タクトに余裕がある場合やワーク形状が不安定な場合「回数平均」など、場合による設定の使い分けが必要。
①ゼロトラッキングは自動で、ゼロセットはラダーから任意のタイミングでゼロ点補正すること
②ゼロ点補正が正常にされない場合は、設定した幅などを確認する